Анализ и синтез цифровой системы продольного канала автопилота
1) уравнения кинематики относительно первой и второй осей базовой СК; уравнения движения динамики характерной точки относительно первой и второй проекционной СК;
2) уравнение углового движения относительно оси ОZ;
3) уравнение кинематики углового движения относительно оси ОZ;
4) уравнения связи, описывающие взаимосвязь между углами Эйлера-Крылова, характеризующим взаимное положение базовой и проекционной СК.
В продольном движении с учетом изменения следующих параметров: угла тангажа γ, угла наклона траектории γа, угла атаки а, скорости ЛА - V, высоты полета - Vс, угловой скорости ω2, получим систему дифференциальных уравнений продольного движения в таком виде:
 ;
;
![]() (1.4)
(1.4)
![]() .
.
На втором этапе линеаризации упрощенной ММ введем вариации параметров состояния:
![]()
 … ……… …… (1.5)
… ……… …… (1.5)
Реальные значения переменных состояния через их требуемые значения и вариация будут выглядеть так:
Произведем линеаризацию ММ с учетом того, что мы управляем только угловыми параметрами, параметры m(B) и m(Г) являются функциями высоты и скорости, а, следовательно, в режиме снижения по глиссаде меняются мало. Будем считать их константами также, как и угол γа, равный -2,3град.
В результате линеаризации получим:
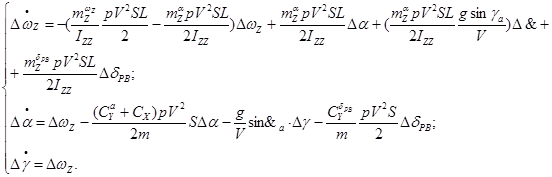 (1.7)
(1.7)
Су - коэффициент подъемной силы по углу атаки;
![]() - коэффициенты аэродинамического момента по углу атаки.
- коэффициенты аэродинамического момента по углу атаки.
отклонению руля высоты и угловым скоростям соответственно.
Формирование функциональной схемы системы
Функциональная схема системы управления представлена на рис. 1.2:
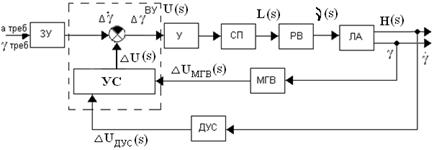
Рисунок 1.2- Функциональная схема системы управления углами атаки и тангажа
На рис.1.2 обозначено:
ЗУ – задающее устройство
ВУ - вычислительное устройство;
У - усилитель;
СП - сервопривод;
РВ - руль высоты;
УС - устройство согласования;
МГВ - малогабаритная гировертикаль;
ДУС - датчик угловой скорости.
Угол атаки а с помощью датчиков измерять сложно, поэтому при необходимости его значение рассчитывают, используя значение измеряемых параметров. В данном случае обратная связь по углу атаки не применяется.
Представим ранее полученную линейную систему уравнений в форме Коши:
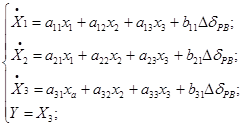
 (1.8)
(1.8)
Исходя из тактико-технических характеристик ЛА, приведенных ниже, получим расчетные параметры ММ.
Геометрические данные: S= 1.046 м2, L= 4.05 м.
Массово-инерционные характеристики: m=175 кг, Izz=62,8*106
Аэродинамические характеристики: Су =1.2; tу =-0.12; Сх =0.48;
С*п =0.88; tx = 3.8-10-3; тz =-0.17; тo-4.8-10'3.
Тяговые характеристики: Р=6*229,5 кН; Уг=236 м/с;тв =80 кг/с;
тг - 0,1 кг/с.
Данные высоты, скорости углов: У'г=Уо=70 м/с; Ут=Уо=400 м;
Расчетные параметры матриц:
a11=0,019; а12=-0,265; а13=-2,1*10-4; b11=-0.376;
а21=1; а22=-9,79; а23=0,0196; b21=6*10-4;
а31=1; а32=0; а33=0; b31=0.
Навигация
- Главная
- Проектирование автомобильной дороги
- Структура и функции амортизаторов
- Техническая эксплуатация автомобилей
- Гидравлические системы автомобилей
- Общее устройство коробки передач автомобиля
- Содержание дорог в зимний период
- Транспорт